Лекция 1. Предмет и задачи биомеханики
Первая лекция по дисциплине «Биомеханика двигательной деятельности» — описывает предмет и задачи биомеханики. Биомеханика двигательных действий изучает свойства и функции опорно-двигательного аппарата и двигательные действия человека с позиции классической механики (на основе понятий, принципов и законов классической механики). Цель биомеханики двигательных действий состоит с одной стороны, в повышении эффективности двигательных действий человека, а с другой – в предупреждении травм при выполнении двигательных действий и уменьшении их последствий.
Лекция 1
Предмет и задачи биомеханики
1.1. Предмет биомеханики
Предмет науки – совокупность объектов или процессов, которые изучает данная наука.
Биомеханика двигательных действий изучает свойства и функции опорно-двигательного аппарата и двигательные действия человека с позиции классической механики (на основе понятий, принципов и законов классической механики).
Биомеханика – смежная наука. Она возникла на «стыке» двух наук: биологии – науки о жизни и механики – науки о механическом движении материальных тел и происходящих при этом взаимодействиях между телами.
За время своего развития классическая механика выработала широкий круг понятий, которые в настоящее время используются в биомеханике: перемещения, скорости и ускорения тела; силы, импульса силы, работы, мощности, энергии, ОЦТ (ОЦМ) и др.
Например, под скоростью тела понимается отношение пути (перемещения), пройденного телом ко времени за который этот путь пройден. В биомеханике изучаются скорости движения звеньев опорно-двигательного аппарата, а также скорость сокращения мышц человека. Одним из центральных в механике является понятие силы как количественной меры механического взаимодействия тел. В биомеханике двигательных действий анализируются силы, действующие на человека, а также силы, возникающие в его опорно-двигательном аппарате, например, силы тяги мышц, силы трения в суставах.
Кроме круга понятий в рамках классической механики установлены принципы (принцип относительности Галилея, принцип Д’Аламбера, принцип возможных перемещений) и законы движения материальных тел (законы Ньютона, законы сохранения энергии, количества движения (импульса) и другие.
На основе принципа Д’Аламбера и принципа возможных перемещений задачи динамики перемещения человека могут быть сведены к задачам статики.
В биомеханике на основе законов механики анализируются двигательные действия человека. Так, например третий закон Ньютона гласит: «Силы, с которыми действуют друг на друга два тела, всегда равны и направлены по одной прямой в противоположные стороны», рис.1.1. Этот закон проявляется, например, при ударе по мячу: рука ударяет по мячу, а сила противодействия со стороны мяча действует на руку, рис.1.2.
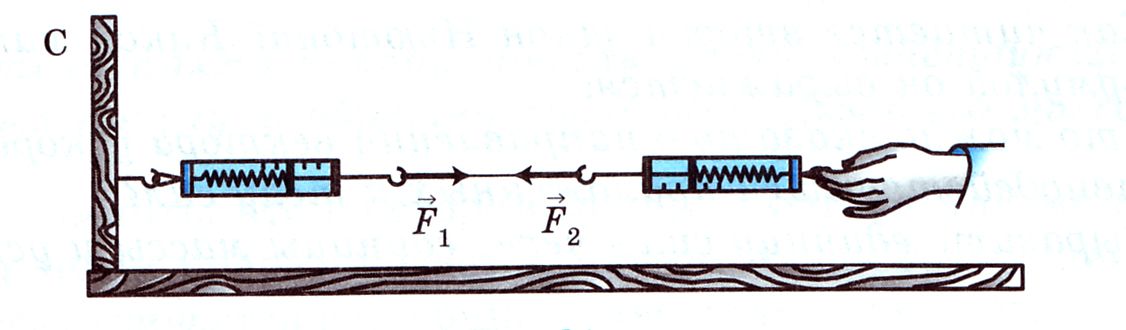
Рис.1.1. Иллюстрация проявления третьего закона Ньютона
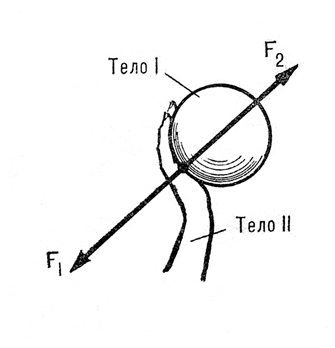
Рис.1.2. Проявление третьего закона Ньютона в биомеханике (В.А. Петров, Ю.А. Гагин, 1974)
Закон сохранения количества движения системы гласит: «Если на систему не действуют никакие внешние силы, то количество движения системы остается постоянным (сохраняется)». Винтовка и пуля представляют собой одну систему. Перед выстрелом из винтовки сумма количества движения винтовки и пули равна нулю. Давление пороховых газов, сообщая некоторое количество движения пуле, одновременно сообщает винтовке такое же количество движения, направленного в противоположную сторону (это вызывает явление, называемое отдачей винтовки). В результате сумма возникших количеств движения при выстреле будет равна нулю.
Закон сохранения энергии позволяет оценить энергопотери в мышцах при выполнении двигательных действий.
Существует большое разнообразие двигательных действий человека: бытовые, трудовые, оздоровительные (физические упражнения), спортивные и др. В настоящих лекциях с позиций биомеханики рассматривается выполнение человеком оздоровительных и спортивных двигательных действий.
1.2. Цели и задачи биомеханики двигательных действий
Цель биомеханики двигательных действий состоит с одной стороны, в повышении эффективности двигательных действий человека, а с другой – в предупреждении травм при выполнении двигательных действий и уменьшении их последствий.
Рассмотрим, как достигается первая цель – повышение эффективности двигательных действий человека.
Первая задача состоит в разработке биомеханических критериев и оценке двигательных действий спортсмена с точки зрения их эффективности в решении двигательной задачи. В качестве примера решения первой задачи можно привести правильную и неправильную траекторию движения штанги при выполнении тяжелоатлетического упражнения, рис.1.3. Траектория 1 с точки зрения биомеханики является оптимальной, а траектории 2 и 3 – нерациональными, характеризующими ошибочное выполнение двигательного действия.
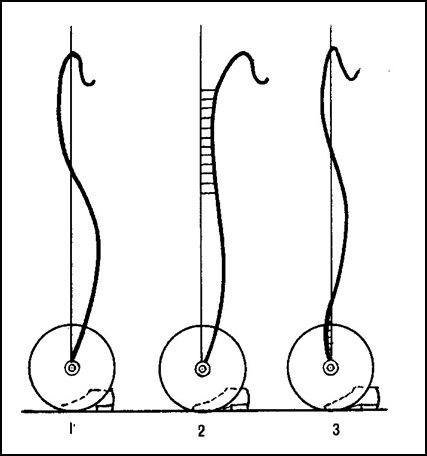
Рис.1.3. Оптимальная (1) и нерациональные (2 и 3) траектории движения штанги при выполнении тяжелоатлетических упражнений (В.И.Фролов, 1980)
Второй задачей является разработка новых вариантов техники и оценка их эффективности. В качестве примера решения второй задачи можно привести историю изобретения прыжка в высоту способом Фосбери-флоп. Этот способ был изобретен в США. В 1968 году на Летних Олимпийских играх в Мексике Дик Фосбери с помощью нового способа выиграл золотую олимпийскую награду, установив новый олимпийский рекорд (2,24 метра), рис. 1.4. Основное преимущество новой техники прыжка заключается в том, что траектория общего центра масс спортсмена (ОЦМ) проходит под планкой, в то время как при способе перекидной – над планкой.

Рис.1.4. Техника движений спортсмена и траектория ОЦМ при переходе через планку прыжком Фосбери-флоп
Третьей задачей является моделирование новых двигательных действий и оценка возможности их выполнения спортсменом. Так, например, компьютерная программа, моделирующая полетную фазу при выполнении гимнастических упражнений, позволяет на основе данных ведущих спортсменов мира задать основные биомеханические характеристики движения, после этого оценить, возможно ли в принципе его выполнить, рис.1.5.

Рис.1.5. Компьютерная программа, моделирующая полетную фазу при выполнении гимнастических упражнений (разработчик В.П. Аксенов)
Четвертой задачей является разработка биомеханически целесообразных тренажеров для занятий физической культурой и спортом. Примером решения этой задачи может являться конструирование различных гребных тренажеров, позволяющих имитировать движения гребца на суше, рис.1.6.

Рис. 1.6. Гребной тренажер
Пятой задачей является разработка и улучшение снаряжения спортсмена, повышающего эффективность двигательных действий. В качестве примера решения этой задачи можно привести использование специальных маек в пауэрлифтинге, рис.1.7. или гидрокостюмов в плавании, рис.1.8.

Рис.1.7. Использование специальной майки в пауэрлифтинге
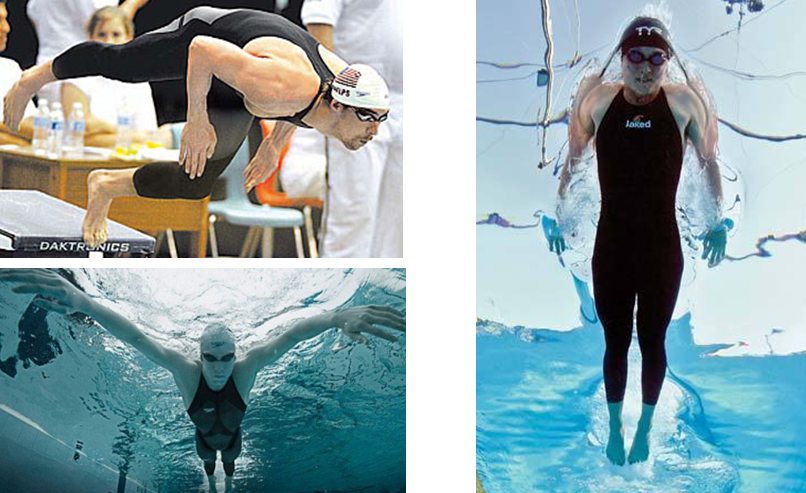 Рис. 1.8. Применение гидрокостюмов в плавании
Рис. 1.8. Применение гидрокостюмов в плавании
Не менее важной целью биомеханики является предупреждение травм при выполнении двигательных действий и уменьшение их последствий.
Поэтому шестой задачей, которую помогает решить биомеханика, является оценка правильности существующей техники и выявление ошибок, которые могут привести к травмам. В качестве примера можно привести изучение вопросов профилактики травм позвоночника при выполнении приседания со штангой на плечах посредством компьютерной программы Spine, разработанной на кафедре биомеханики НГУ им. П.Ф. Лесгафта (разработчик Г.А. Самсонов). Эта программа позволяет оценить давление на межпозвонковые диски при выполнении силовых упражнений, рис.1.9. Использование программы Spine позволяет оценить технику выполнения силового упражнения с этих позиций и установить предельное значение массы штанги, превышение которого может привести к травмам позвоночника (например, грыже межпозвонкового диска).
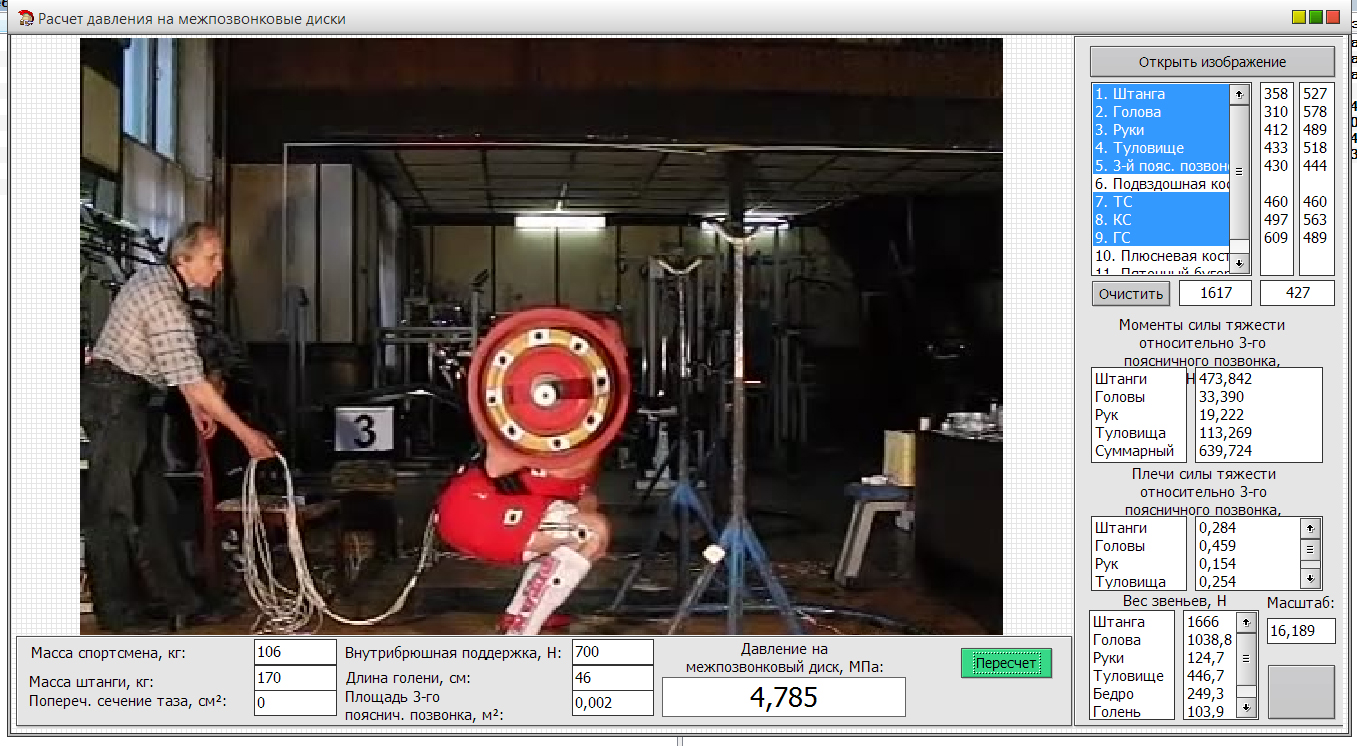
Рис.1.9. Пользовательский интерфейс компьютерной программы Spine (разработчик Г.А. Самсонов)
Современный инвентарь, используемый в футболе и хоккее, а также в боксе, легкой атлетике и велоспорте также использует знания, накопленные биомеханикой. Он позволяет уменьшить возможности получения спортсменами тяжелых травм и решить седьмую задачу, стоящую перед биомеханикой двигательных действий, рис.1.10.

Рис.1.10. Примеры защитного снаряжения, используемые в хоккее и боксе
Рекомендуемая литература
1. Попов, Г.И. Биомеханика двигательной деятельности: учеб. для студ. учреждений высш. проф. образования / Г.И. Попов, А.В. Самсонова.- М.: Издательский центр «Академия», 2011.- 320 с.
2. Петров, В.А. Механика спортивных движений / В.А.Петров, Ю.А. Гагин .- М.: Физкультура и спорт, 1974.- 232 с.
3. Самсонова А.В., Кичайкина Н.Б., Самсонов Г.А., Борисевич М.А. Вопросы профилактики травм позвоночника при выполнении атлетических упражнений //Труды кафедры биомеханики университета им. П.Ф.Лесгафта.- 2014.- Вып. 8.- С. 38-44.
Источник
Биомеханика тела: что должен знать фитнес-тренер
Начинать фитнес-тренировки важно с опытным тренером, который имеет хорошую теоретическую подготовку по основам биомеханики. Он объяснит, как именно нужно двигаться, чтобы «выжать» максимум пользы из упражнения, сможет эффективно оценить движение и внесет необходимые коррективы для обеспечения максимального прогресса.
Почему же без тренера никак? Дело в том, что обычные движения человека являются эволюционными. Мы не задумываемся, как ходим, поднимаем руки и наклоняемся. Наш организм использует для этого силу тех мышц, что сильнее, и не задействуют те, что не нужны ему для выполнения этого движения. Никто ведь специально не напрягает пресс, чтобы поднять тяжелую вещь? Задача же фитнеса — сделать тело крепким и здоровым, обучить безопасному распределению нагрузки на мышцы.
Движение созданных человеком машин осуществляется благодаря всевозможным рычагам внутри конструкции. Так же и с нашим телом: внутри у него сотни различных рычагов, представленные костями разной формы, размера и плотности. Их изучал еще Леонардо да Винчи, представляя человеческое тело сложным механизмом.
Чтобы привести рычаг в действие, нужно воздействие двух сил:
- движущей силы (тяга мышц),
- силы сопротивления (сила тяжести).
Рычаг первого рода представлен рычагом равновесия. В нем есть точка опоры, а по разные стороны от нее прилагаются силы, которые могут уравновешивать друг друга. Самый наглядный пример рычага первого рода — позвоночный столб.
Спереди от него — грудная клетка, брюшная полость и органы, которые под действием силы тяжести стремятся вниз. Чтобы их поддерживать, по другую сторону позвоночника есть мышцы, которые сокращаются и создают противодействие. Благодаря их работе человек не падает вперед.
Рычаг второго рода, в свою очередь, делится на два вида: рычаг скорости и рычаг силы.
В рычаге скорости есть точка опоры. Движущая сила воздействует рядом с этой точкой опоры, а сила тяжести — дальше от нее, что позволяет значительно ускорить движение этого рычага. Эволюция большую часть человеческих рычагов реализовала именно с таким механизмом, чтобы сделать нас быстрыми и ловкими, способными убегать, нападать и защищаться. Но где есть плюс, есть и минус — чтобы задействовать рычаг скорости, нужно потратить много энергии.
В рычаге силы и сила воздействия, и сила тяжести тоже располагаются по одну сторону от точки опоры. Однако движущая сила воздействует дальше от точки опоры, а силы тяжести — ближе. На движение такого рычага нужно меньше энергии, но и скорость будет ниже.
«Что нам дают знания о принципах работы рычагов внутри человеческого тела?
Понимая особенности рычагов, вы сможете принять оптимальное исходное положение, точно выбрать вес отягощения, темп выполнения упражнения и получить максимальный эффект от тренировочного воздействия»
Упражнение: Многосуставное.
Суставы: Тазобедренный, коленный, голеностопный.
Воздействие: Ягодичные мышцы, мышцы задней, внутренней, передней поверхностей бедра, мышцы голени.
Исходное положение:
- Стоя, стопы на ширине таза (возможна более широкая постановка стоп, зависит от цели упражнения).
- Спина прямая, лопатки приведены и опущены.
- Наклон корпуса (за счет перемещения таза назад) 5−10 о.
- Гриф располагается на верхней части трапециевидных мышц и спроецирован на середину свода стопы (продольных сводов стопы).
- Хват чуть шире плечевых суставов, предплечья параллельны, в одной плоскости корпусом.
Движение:
(На вдохе) выполнить приседание до угла 90о в коленных суставах, (на выдохе) вернуться в исходное положение.
Методические указания тренера:
- Движение начинается с перемещения таза назад (наклон таза вперед).
- Коленный сустав двигается по направлению стопы (на средний палец), к ее переднему краю.
- В конечной точке амплитуды оставлять 2−5 о до полного разгибания ноги в коленном суставе (для начинающих).
- Штанга спроецирована на середину свода стопы (продольных сводов стопы).
- Контролировать правильные изгибы позвоночника.
Упражнение: Односуставное.
Суставы: Коленный.
Воздействие: Четырехглавая мышца бедра.
Исходное положение:
- Сидя в тренажере, стопы на ширине таза, параллельны друг другу, опорный валик располагается максимально близко к стопе, (для сохранения максимального диапазона в голеностопном суставе).
- Ось вращения тренажера совпадает с коленным суставом.
- Спина прямая, лопатки приведены и опущены.
Движение:
(На выдохе) выполнить максимально возможное разгибание голени, (на вдохе) вернуться в исходное положение
Методические указания:
- На протяжении всего движения опорный валик стабилен.
- Движение выполнять в контролируемом темпе (исключить инерцию и соударения весовых пластин).
- Контролировать правильные изгибы позвоночника.
Упражнение: Многосуставное
Суставы: Суставы ключицы, плечевой, локтевой
Воздействие: Трапециевидная, ромбовидные мышцы, широчайшая мышца спины, дельтовидная, трехглавая и двуглавая мышцы плеча.
Исходное положение:
- Стоя в наклоне, стопы на ширине таза.
- Спина прямая.
- Гриф в распрямленных руках, на уровне коленного сустав и спроецирован на середину свода стопы (продольных сводов стопы).
Движение:
(На выдохе) выполнить тягу к поясу, (на вдохе) вернуться в исходное положение.
Методические указания:
- Движение начинать с приведения и опускания (депрессии) лопаток.
- Штанга двигается вдоль бедер (максимально близко) и спроецирована на середину свода стопы (продольных сводов стопы).
- Контролировать правильные изгибы позвоночника.
Источник